Funded research project
My roles: Researcher, Software developer
My roles: Researcher, Software developer
This project encompassed the design, implementation, and behavioral analysis of a five-robot distributed system.
The robotic agents were tasked with collectively locating designated "worksites," communicating worksite locations among team members, and transporting virtual "resources" to a central base station.
The experimental framework evaluated the comparative performance of two distinct robot controllers for collective foraging under conditions of simulated noise in global positioning data. The study demonstrated that recruitment mechanisms, implemented through broadcast messaging protocols in proximity to worksites, enhance swarm robustness under uncertain positioning conditions.
The research findings have been published in the 2018 IEEE International Conference on Intelligent Robots and Systems (IROS).
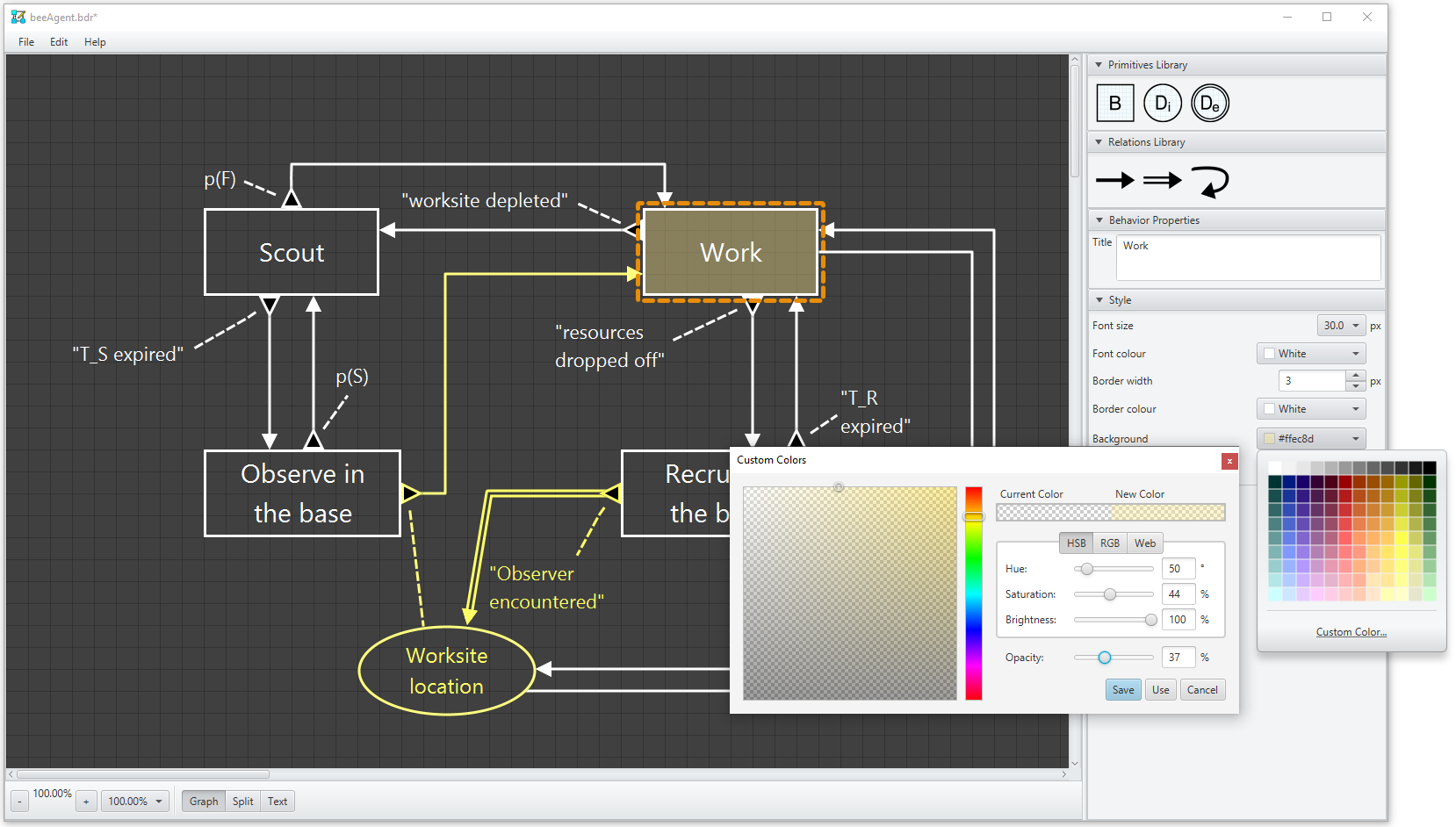
A basic foraging loop
Congestion formation
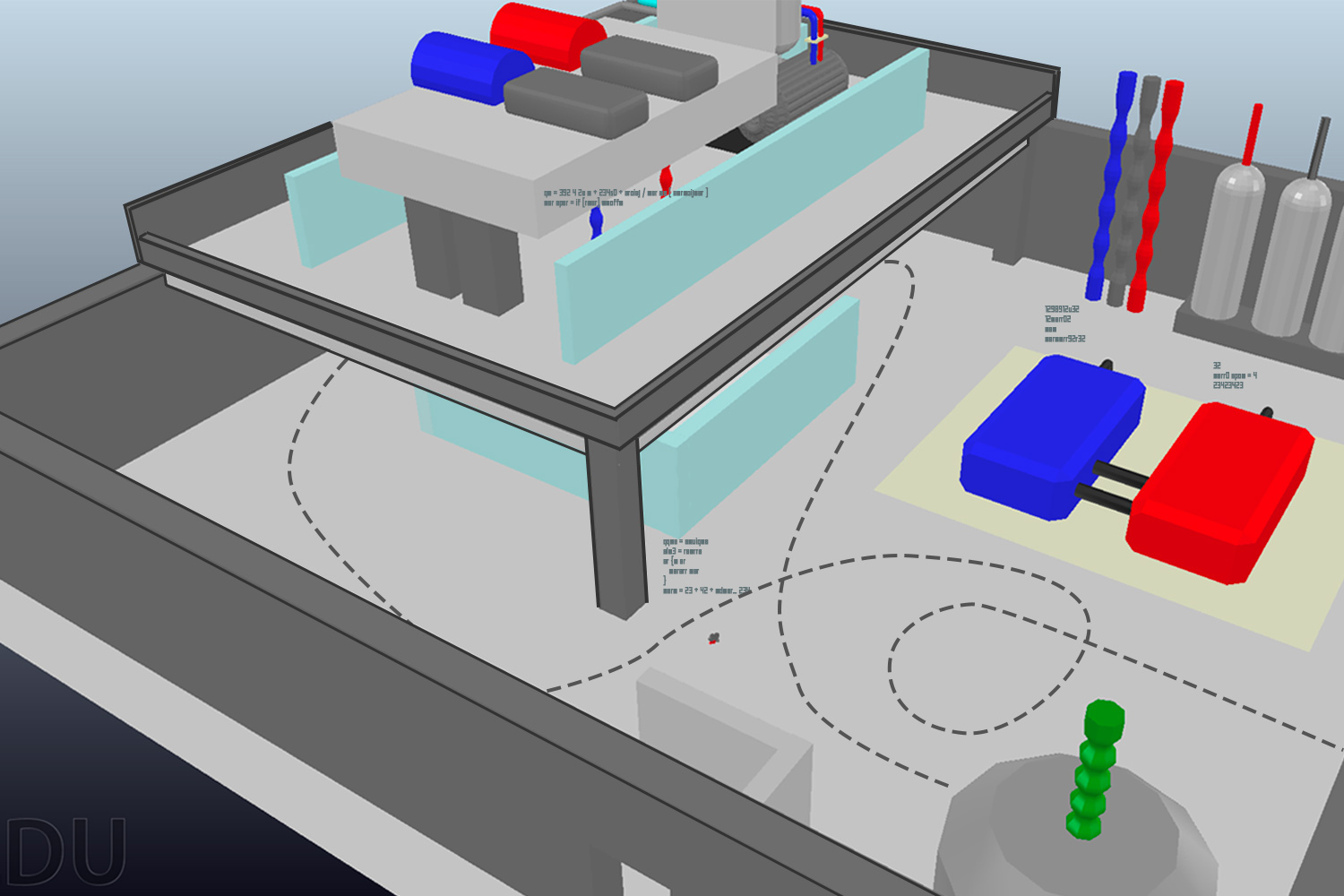
A semi-virtual implementation

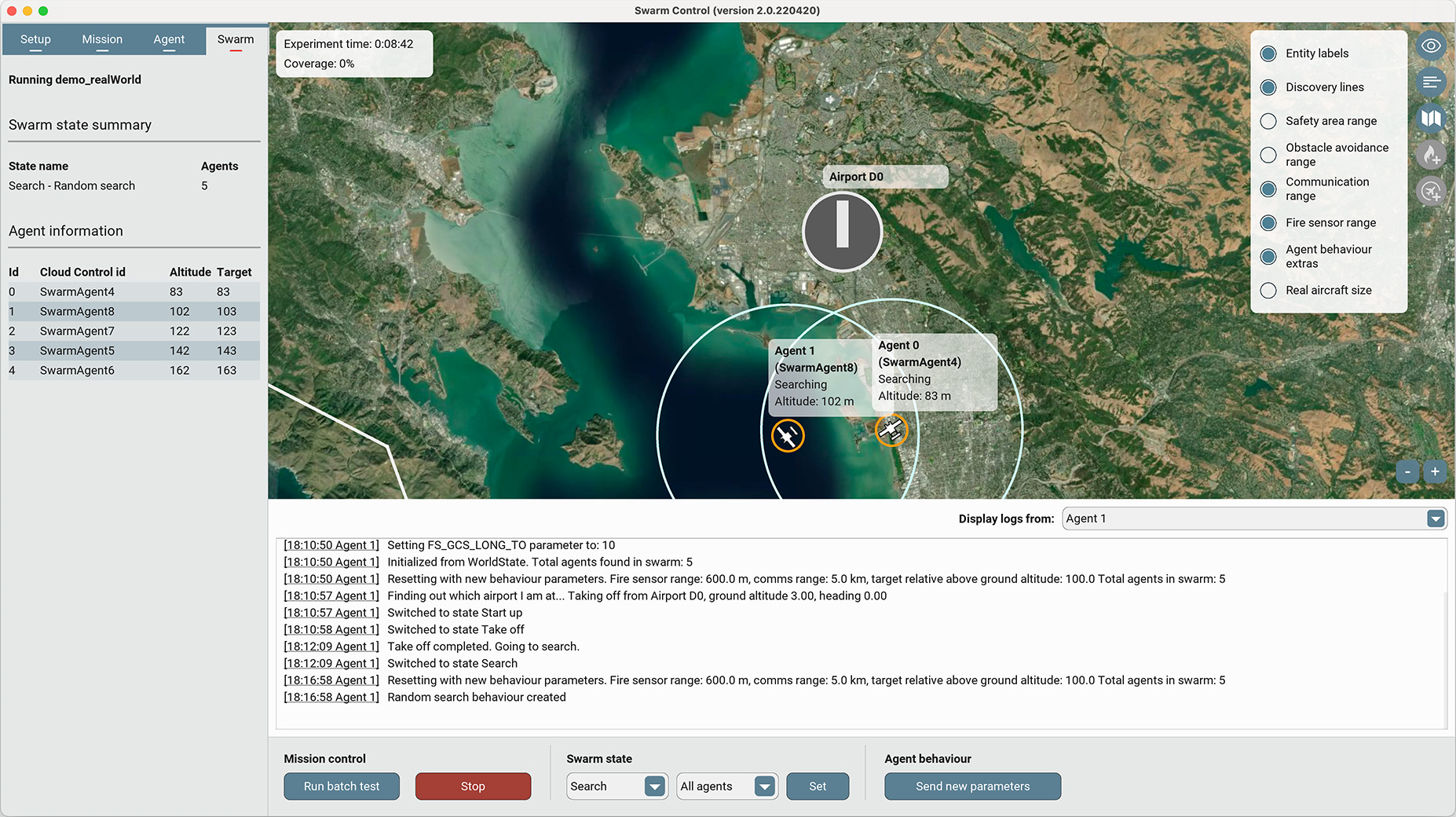
The experimental platform comprised five e-puck robots operating within a semi-virtual environment, supported by the VICON motion capture positioning system. This configuration enabled precise control over positioning data noise levels and facilitated the generation of pseudo-random environmental conditions.
Worksites were physically marked on the arena floor solely for visualization purposes.
Drawing inspiration from social insect communication strategies, the system implemented virtual recruitment protocols that simulated decentralized communication without reliance on global data repositories. Individual robots communicated exclusively with nearby agents through localized interactions.
In the actual implementation, robots interfaced with a centralized server to obtain positional, worksite, and recruitment data. The server maintained a comprehensive virtual world model, tracking base location, worksite positions, robot coordinates, robot recruitment messages and resource unit quantities at each worksite.