Client: Bristol Robotics Laboratory, United Kingdom
Website: https://nuclearrobots.org
My roles: Technical researcher, Software developer
Website: https://nuclearrobots.org
My roles: Technical researcher, Software developer
Research

My first role in the project was to gather requirements from all the team members and recommend a simulation environment that was extendable, relatively feature-rich and computationally efficient. To do this, I implemented multi-robot simulations in V-REP, Gazebo and ARGoS and performed a number of benchmark tests involving different robot team and virtual world sizes, as well as different computer setups.
The research was published in Pitonakova, L. et al (2018) Proceedings of the 19th Towards Autonomous Robotic Systems Conference.
Development
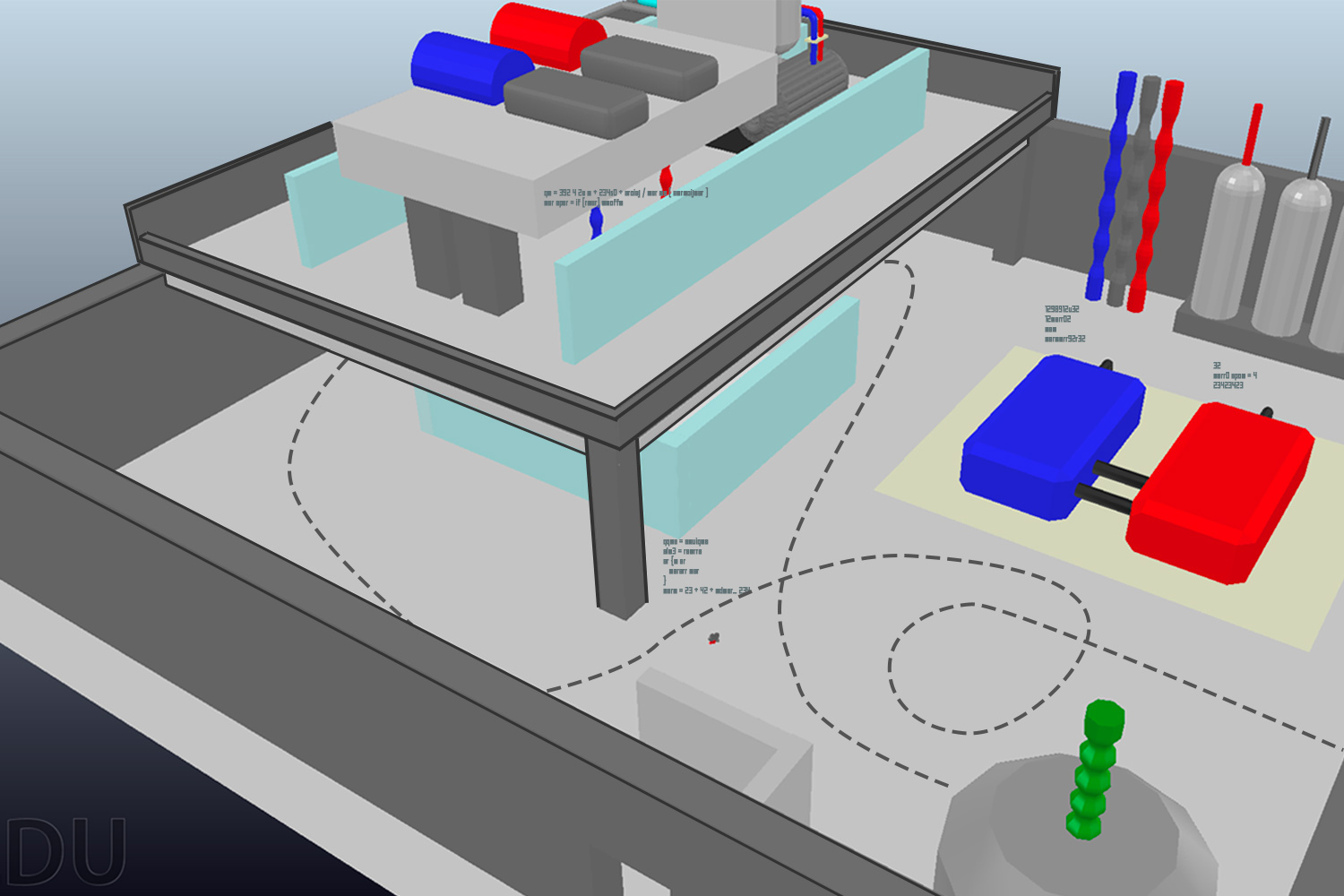 Based on my recommendation, the team decided to use the V-REP simulator, mostly because of its extendability and the ease of importing 3D models
of various robotic platforms. I created a simulation environment in V-REP featuring a nuclear reactor model and a system of C++ plugins for V-REP
that enabled multiple simulated and real robots, developed independently by the
partner institutions, to operate in a common virtual environment held in a "master" computer. This was achieved by using custom communication protocols that worked
over wi-fi.
Based on my recommendation, the team decided to use the V-REP simulator, mostly because of its extendability and the ease of importing 3D models
of various robotic platforms. I created a simulation environment in V-REP featuring a nuclear reactor model and a system of C++ plugins for V-REP
that enabled multiple simulated and real robots, developed independently by the
partner institutions, to operate in a common virtual environment held in a "master" computer. This was achieved by using custom communication protocols that worked
over wi-fi.
Another useful feature of this system of components was the possibility to stream the state of the entire simulated world, including that of real robots, into a high-end rendering application that could, for instance, provide a virtual reality visualization of the robot mission. I demonstrated this capability by developing a 3D visualization application that could run on a different computer than the "master" simulation and display what the robots were doing.